.jpg)


.jpg)

(1).jpg)




 Рейтинг: 4.1/5.0 (1623 проголосовавших)
Рейтинг: 4.1/5.0 (1623 проголосовавших)Категория: Программы
Это руководство быстрого старта для пользователей. прошивка квадрокоптер уже загружена на APM 2.6
установите Mission Plannerперейдите на страницу загрузки и выберите самую последнюю версию.

Следуйте инструкциям до завершения установки программы. В процессе установки программа автоматически установит необходимые драйвера. Если у Вас возникает ошибка DirectX. то необходимо его обновление. Если вы получаете предупреждение, как показано на картинке ниже, выберите Установить драйвер для продолжение установки программы.

После установки программы запустите её, она автоматически информирует вас. если есть обновления. Пожалуйста используйте по возможности самую последнюю версию Mission Planner
подключите радиоприемник: PWM или PPM сигналы

После скачивания и установки Mission Planner на вашу наземную станцию, подключите APM к компьютеру используя микро-USB провод. Не подключайте провод к USB-хабу. подключайте провод к компьютеру.

После установки Mission Planner подключите через micro-USB APM с системой Windows, которая автоматически определит и предоставит драйвера для устройства, запустите программное обеспечение и выберите порт который будет указан в списке, выберите необходимую скорость (по умолчанию это 115200 бод/с) как показано на рисунке

Выберите “соединение” в правом вверхнем углу экрана. что бы загрузить параметры MAVLINK в APM. Mission Planner будет показывать окно с параметрами загрузки данных.

Когда инициализация параметров пройдёт окно загрузки пропадёт.

Включите передатчик и убедитесь, что он в режиме самолета (Полетному контроллеру необходим режим полета. независимо от платформы на эксперементальной основе) и установите все стики по центру.

Левая ручка будет контролировать газ (THR) и рысканья (Yaw), правая будет контролировать крен (Roll) и тангаж (Pitch). Трехпозиционный переключатель будет контролировать режимы полета.
В Mission Planner выберите “Radio Calibrating”. нажмите на “калибровка” и правом нижнем углу, Mission Planner выведет окно, что батарея не должна быть подключена. как и моторы с пропеллерами.

Нажмите “ок” и начните двигать стиками в каждую из сторон до предела, а так же трехпозиционный тумблер. наблюдайте за результатами, красные линии установят пределы минимамльного и максимального значения вашего радиопередатчика.

Когда все значения каналов радио смогли показать свой минимум и максимум нажмите в программе “Done”. Данные вам отобразятся в отдельном окне, нормальное значение около 1100 для минимума и 1900 для максимума.

Винты должны быть прекреплены в соотвествии с конфигурацией, они устанавливаются в самую последнюю очередь. после того, как все настроено. ниже приводится схема и направление пропеллеров и стороны кручения моторов.
Конфигурация квадрокоптер X и Plus  Конфигурация квадрокоптер H рама
Конфигурация квадрокоптер H рама  Конфигурация трикоптер
Конфигурация трикоптер  Конфигурация гексакоптер и октакоптер
Конфигурация гексакоптер и октакоптер  Конфигурация трикоптер Y6
Конфигурация трикоптер Y6  Конфигурация квадрокоптер X8
Конфигурация квадрокоптер X8 
Безопасность это ключ в успешном полете. Пожалуйста изучите информацию по безопасным полетам перед полетами. Выберите безопасную площадку для полетов подальше от людей и всегда проверяйте работу всех органов управления и крепления перед подключением батареи. Прочтите вики раздел "первый полет" по снятию с охраны (arming) и постановке на охрану (disarm) квадрокоптера, так же по управлению и вариантам полетов.
Когда все готово для полетов. установите квадрокоптер на взлетной площадке лицом от вас. Подключите заранее заряженную LiPO батарейку к разъемам. Следуйте безопасному снятию с охраны, что бы это не повлекло "сумашедший полет" (вики)
Последнее это подключение батарейки (предварительно включив аппаратуру со стиком газа утопленного в минимум)

Постепенно изучайте беспилотные полетные режимы, для получение всех возможностей от ArduCopter, включая режимы Loiter и полет по точкам

















Как работает программа для квадрокоптера. и зачем вообще необходимо скачивать и обновлять приложения? Компания DJI Innovations постоянно совершенствует программные комплексы, позволяющие повысить производительность полетных аппаратов и сделать их работу стабильной. Софт для дронов работает согласно сложным алгоритмам, которые разрабатываются для безошибочной работы систем, установленных на квадрокоптеры DJI .
 Программа для квадрокоптера
Программа для квадрокоптера
Программа для квадрокоптера может бесперебойно функционировать исключительно благодаря встроенному в платформу контроллеру, выполняющего роль бортового компьютера летательного аппарата. Контроллер считывает входящий сигнал управления, затем осуществляется сложная цепочка действий программного алгоритма, а в случае выявления ошибки компьютер отдает команду системе, обеспечивающей безаварийную работу коптера. Программный комплекс дрона разрабатывается с большим количеством микропрограмм, каждая из которых отвечает за стабильный функционал различных систем мультироторной платформы.
 Лучшие программы для квадрокоптеров и съемки
Лучшие программы для квадрокоптеров и съемки
Разработчики непрерывно совершенствуют программный софт для модельного ряда летательных аппаратов DJI Innovations, что позволяет максимально точно корректировать работу автономных источников питания, оптимизировать функционал логических элементов, а также улучшить качество шифрования управляющего сигнала. Обновление также необходимо для повышения качества сигнала между приемником и передатчиком полетного комплекса. Также апгрейду подвергаются подвесная система, модуль управления работой видеокамеры, система пространственного позиционирования и другие составные комплексы мультироторной платформы.
Программа для квадрокоптера: мобильные приложения![]() Программы для трансляции видео с квадрокоптера
Программы для трансляции видео с квадрокоптера
Рассмотрим в качестве примера возможности мобильного приложения Go на примере коптераPhantom 3 Standard. Оно разрабатывается для манипулирования полетным устройством при помощи гаджетов. При помощи планшета (любого смартфона) оператор может полноценно управлять полетным комплексом, переключать различные рабочие режимы платформы, просматривать снятые видеоролики и фотографии, а также использовать возможности интерактивной карты. Используя Go, пилот может задать точный путь следования беспилотной платформы, которого она будет придерживаться. Для максимально точного пилотирования оператор может использовать контрольные точки, в рамках которых дрон будет летать и вести видеосъемку.
 Скачать и установить программы для квадрокоптеров DJI
Скачать и установить программы для квадрокоптеров DJI
Функция автопилота позволяет летательному комплексу вернуться в точку вылета в случае разрядки автономного источника питания или обрыва управляющего сигнала. Приложение дает возможность пилоту использовать функционал встроенного редактора для работы с полученным видеоконтентом и фотографиями. Оператор имеет возможность поделиться материалом со зрителями, для чего достаточно включить режим стримминга. Программа для квадрокоптера существенно упрощает процесс проведения аэровидеосъемки, поскольку платформа может работать в автоматическом режиме, а пилот в это время имеет возможность сосредоточиться на видеокамере.
Это проект создания управления джойстиком квадрокоптера ArDrone 2.0 c из ROS.
1. Квадрокоптер ArDrone 2.0
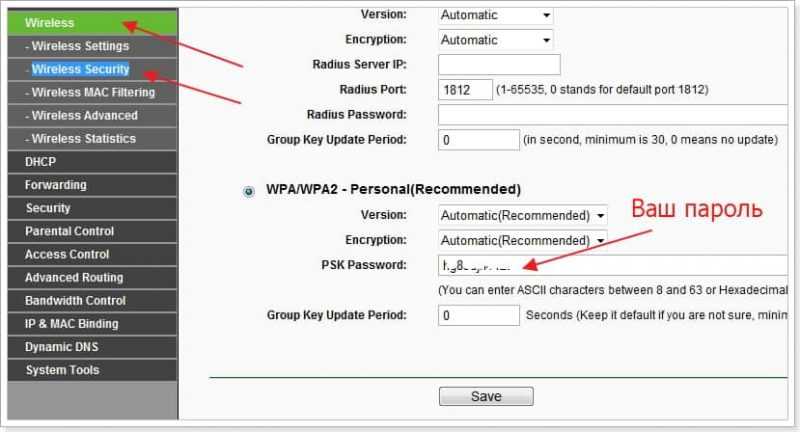
Parrot AR.Drone – это радиоуправляемый квадрокоптер, то есть вертолет с четырьмя несущими винтами, размещенных на выносных диагональных балках. Сам AR.Drone работает под управлением операционной системы Linux, а в качестве пульта ДУ к квадрокоптеру может выступать практически любой сенсорный смартфон и планшет на Android или iOS. Дистанция устойчивого управления по Wi-Fi – от 25 до 100 метров и зависит от помещения и погодных условий, если полеты происходят на улице.


Квадрокоптер Parrot AR.Drone 2.0 оснащен 4-мя моторами мощностью 14.5 Вт и выдающих 28 500 RPM. В редукторе используются шестерни из нилатрона для понижения шумов, а бронзовые самосмазывающиеся подшипники позволяют всему этому эффективно вращаться. На контроллере каждого мотора используется 8 MIPS AVR CPU, а сам контроллер влагоустойчив. Максимальная скорость полета — 18 км/ч
На борту обновленной версии квадрокоптера установлены 2 видеокамеры:
Фронтальная HD камера выдает 720p, 30 fps с углом объектива в 92 градуса.
Нижняя QVGA камера (320х240), 60 fps с углом объектива 64 градуса. Её AR.Drone так же использует для замерения горизонтальной скорости.
«Мозги» дрона представляют из себя 1GHz ARM Cortex A8 процессор с 800 MHz DSP TMS320DMC64x для видео. 1Гбит DDR2 RAM на 200MHz. И управляется это всё с помощью Linux 2.6.32. Соединение с «пультом» управления (коим являются iOS и Android девайсы) происходит по WiFi. Так что коптер несет на себе WiFi точку.
Ориентация в пространстве происходит за счет 3-х осевого гироскопа, 3-х осевого акселерометра, 3-х осевого магнитометра (магнитный компас), датчика давления и ультразвукового высотомера
Электроника и датчики
AR.Drone это непросто квадрокоптер, а квадрокоптер с задумкой под идею дополненной реальности (Augmented Reality Drone). Для него есть игровые приложения дополненной реальности, а еще у него открытый API.
Из-за низкой стоимости, большого количества качественных сенсоров, а так же благодаря открытому API, AR.Drone стал популярной платформой для научных экспериментов и образовательных целей. Он применяется в работах по автоматическому управлению, обучению AI, автономному видеонаблюдению, взаимодействию человек-машина, и т.д.
У меня возникло желание организовать голосовое управление AR.Drone из ROS, чтобы в перспективе он работал в паре с роботом Turtlebot. Но для начала необходимо для подстраховки сделать Ardrone управляемым с удобного устройства. Я решил выбрать джойстик.
2. Драйвер квадрокоптера ArDrone 2.0 для ROS
Ardrone_autonomy является ROS драйвером для квадрокоптера Parrot ArDrone. Поддерживает квадрокоптеры ArDrone 1.0 и ArDrone 2.0. Этот пакет является ответвлением пакета ArDrone Brown. Пакет позволяет получать сообщения с датчиков ArDrone, получать изображения с камер, управлять движением квадрокоптера и свечением светодиодов.
Установка пакета ArDrone autonomy. Сначала клонируем код в директорию пакетов (ROS_PACKAGE_PATH — у меня ros_pkgs)
Далее — компиляция ArDrone SDK 2.0. Запускаем скрипт build_sdk.sh
Если компиляция прошла успешно — проверяем содержимое каталога lib
Должно быть так:libavcodec.a libavformat.a libpc_ardrone_notool.a libvlib.a
libavdevice.a libavutil.a libsdk.a
libavfilter.a libpc_ardrone.a libswscale.a
И сборка пакета
Для запуска драйвера
Cписок тем для публикации данных драйвера ardrone_autonomy
Список сервисов драйвера ardrone_autonomy
Информацию, полученную от квадрокоптера, драйвер публикует в тему ardrone/navdata. Тип сообщения ardrone_autonomy::Navdata
Предоставляется следующая информация
header: ROS message header
0: не определен 1: Inited 2: на земле 3,7: в полете 4: Hovering 5: Test (?) 6: не включен 8: Landing 9: Looping (?)
В экспериментальную тему Base публикуются сообщения типа sensor_msg/Imu, выдающие показания линейного ускорения, угловой скорости и ориентации устройчтва по осям x, y, z.
Оба AR-Drone 1,0 и 2,0 оснащен двумя камерами. Одна фронтальная камера направлена вперед и одна вертикальную камеру вниз. Драйвер ardrone_driver создает три темы ardrone/image_raw, ardrone/front/image_raw and ardrone/bottom/image_raw. В каждую из этих тем публикуются сообщения типа image_transport
Для вывода на камеру (текущую)
или на конкретную (допустим front)
Отправка команд для AR-Drone
Взлет — отправка пустого сообщения в тему ardrone/takeoff
Посадка - отправка пустого сообщения в тему ardrone/land
Сборос параметров(аварийная остановка) - отправка пустого сообщения в тему ardrone/reset
После взлета для управления движением ArDrone необходимо посылать сообщения типа geometry_msgs::Twist в тему cmd_vel
-Linear.x: двигаться назад
+ Linear.x: двигаться вперед
-Linear.y: переместить вправо
+ Linear.y: движение влево
-Linear.z: двигаться вниз
+ Linear.z: двигаться вверх
-Angular.z: повернуть налево
+ Angular.z: повернуть направо
Диапазон для каждого компонента должно быть от -1,0 до 1,0. Максимальный диапазон может быть настроен с помощью ROS параметры обсуждаются далее в этом документе. Публикация "0" значение для всех компонентов сделает гул держать зависания.
Вызов службы ardrone/setledanimation будет вызывать выполнение одной из 14 предопределенных светодиодной анимаций для ArDrone.
Параметры
Тип параметра анимации:
Эти анимации можно протестировать в командной строке, например
Вызов службы ardrone/setflightanimation будет выполнять одну из 20 предопределенных полетных анимаций (полетных фигур) для ArDrone. Параметры:
uint8 типов. тип полета анимация, число в диапазоне [0. 19]
uint16 продолжительность. продолжительность анимации. Используйте 0 для длительности по умолчанию (рекомендуется)
Эти анимации можно протестировать в командной строке, например
Полетные анимации можно запустить во время полета ArDrone.
Можно попробовать поуправлять ArDrone и с клавиатуры
rosrun teleop_twist_keyboard teleop_twist_keyboard.py
Но я бы не советовал - управлять очень трудно - пара жестких падений квадрокоптера заставила меня отказаться от этой идеи.
У меня имеелся в наличии джойстик Defender Gamne Racer X7


Defender Game Racer X7 имеет 12 кнопок (включая D-Pad и 2 аналоговых джойстика), а также кнопки Turbo, Clear и Home. Устройство поддерживает вибрационную обратную связь, работающую при помощи 2-х вибромоторов. Подключение к компьютеру производится через интерфейс USB. Джойстик может работать в двух режимах, один из которых HID-устройство, другой - контроллер XBOX360. Переключение производится с помощью кнопки Mode.
Подключаем джойстик к компьютеру с Linux.
Джойстик устройства называются по JSX, у меня было наш джойстик js0. Удостоверимся, что джойстик работает.
На сервере параметров устанавливаем параметр joy_node/dev, где указываем порт подключения нашего джойстика
И запускаем узел joy_node из пакета joy
И смотрим сообщения, публикуемые в тему joy
Создаем новый ROS пакет
Устанавливаем зависимости пакета
Теперь нам необходимо написать скрипт, создающий узел, который будет получать сообщения из темы joy и отправлять команды управления квадрокоптеру Ardrone. Скрипт написан на python.
С помощью джойстика выполняем следующие команды
Текущие значение led-анимации и flight-анимации хранятся на сервере параметров (параметры joystick_num1 и joystick_num2). Последние значения данных, отправляемых в тему cmd_vel также хранятся на сервере параметров (параметр ). Вот его содержимое (nodes/ros_ardrone1_joystick_to_move.py).


Приложение построено таким образом, что оно может работать автономно, практически без вмешательства пользователя. При желании вы можете заложить курс полета квадрокоптера через утилиту, и можете быть уверены, этот курс пролетит машина на «ура». Утилита будет полезна как новичкам в сфере управления такой техникой, так и профессионалам. По крайней мере, функционал у приложения довольно таки богатый. С подключением квадрокоптера через программу проблем возникнуть не должно. Она поддерживает практически все известные на сегодняшний день модели машин, поэтому синхронизация должна произойти буквально за считанные секунды.
Советуем вам внимательно отнестись к изучению функций, и не старайтесь запустить те функции, про которых вы не знаете абсолютно ничего. В приложении есть специальный раздел «Помощь», в котором вы найдете ответы на все интересующие вас вопросы. По своей технической составляющей Litchi является лучшей утилитой в своем жанре, так что уж если и выбирать, то именно эту программу.
Вирусов нет! Проверено.
 Требуется ANDROID 4.1 или более поздняя Покупки внутри приложения:
Требуется ANDROID 4.1 или более поздняя Покупки внутри приложения:
Litchi - управление квадрокоптером 
Приложение построено таким образом, что оно может работать автономно, практически без вмешательства пользователя. При желании вы можете заложить курс полета квадрокоптера через утилиту, и можете быть уверены, этот курс пролетит машина на «ура». Утилита будет полезна как новичкам в сфере управления такой техникой, так и профессионалам. По крайней мере, функционал у приложения довольно таки богатый. С подключением квадрокоптера через программу проблем возникнуть не должно. Она поддерживает практически все известные на сегодняшний день модели машин, поэтому синхронизация должна произойти буквально за считанные секунды.
Советуем вам внимательно отнестись к изучению функций, и не старайтесь запустить те функции, про которых вы не знаете абсолютно ничего. В приложении есть специальный раздел «Помощь», в котором вы найдете ответы на все интересующие вас вопросы. По своей технической составляющей Litchi является лучшей утилитой в своем жанре, так что уж если и выбирать, то именно эту программу.
Вирусов нет! Проверено.
Требуется ANDROID 4.1 или более поздняя Покупки внутри приложения:
Litchi - управление квадрокоптером
4.9 /5. Проголосовали 2.2 %
Похожие на Litchi - управление квадрокоптером Events
Events Преобразователь Файлов
Преобразователь Файлов Youki
Youki KX Music Player +
KX Music Player + Morphyre Music Visualizer для Android
Morphyre Music Visualizer для AndroidВсе материалы представленные на сайте принадлежат их владельцам. Наш сайт, фан сайт, здесь весь материал для ознакомления. Android торговая марка компании Google Inc.
Свяжитесь с администрацией в случае обнаружения проблем на сайте.
Copyright © 2013 Плей маркет.
Copyright © 2013 Плей маркет. Android торговая марка компании Google Inc.

.jpg)